Our main prupose is to use the whole creativity of the world. Every token holder will be able to vote for the future of the project. You can see the votes for new features on UGV's or UAV's as an example. There will be a pool of ideas wich can be integrated to the metaverse robotics, the idea which gets the most votes will be developed by our team, in the future even the developers of the MVR will be voted by public.
Every code on the project will be written in ROS (Robotics Operation System), and everyone will have access to the codes after the intermediate relases over github. To run the codes, Ubuntu 20.04 operating system will be required which can be installed on every personal computer.
The data to use when building the environment and specific characteristics of the robots will be gathered from the internet the availabile free data sets from universities. Since ROS written codes will work on real machines, real test will be possible.
For the design of the simulation environment, open source models of Gazebo are used in the first stage, in future there can be a seperate team only for designing the environment. Our aim is to create the future of metaverse robotics together.
The development will be made by our Developer team, before the release no codes will be published to public. After the release every one can see the released sections of the code on git, but the codes will be licenced by MVR and will be available for only for non commercial use.
The written codes and the simulation environment are tested precisely by our team. We guarantee that the simulation environment will work on every pc if the necessary hardware and software is provided. The aim is to bring this simulation environment to an common platform.
The releases will be made on the dates that are specified after the voting process, there can be delays due to the development, in this case all token holders will be paid back the money amount they lose after the deadline.
MVR project is a clef to connect real world robotics applications with metaverse.

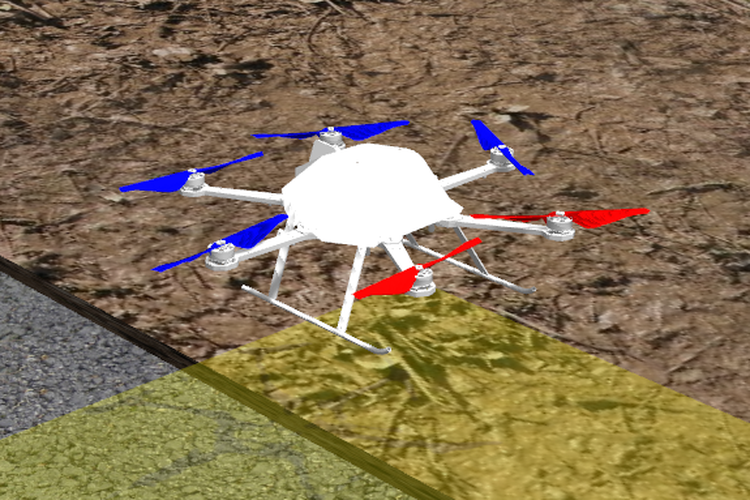
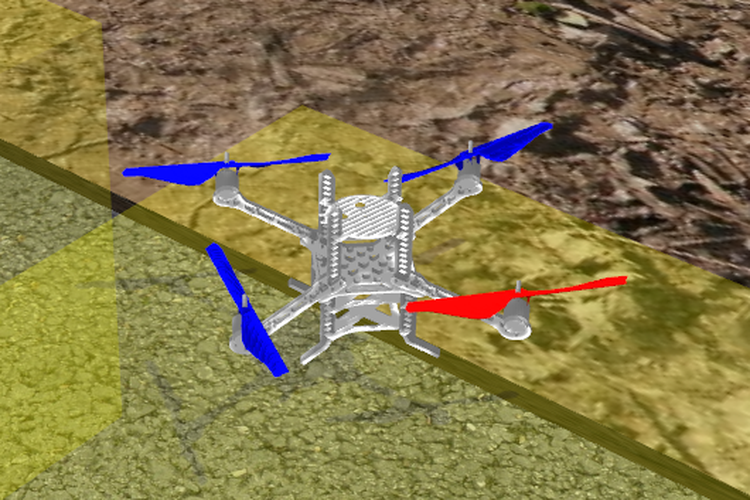
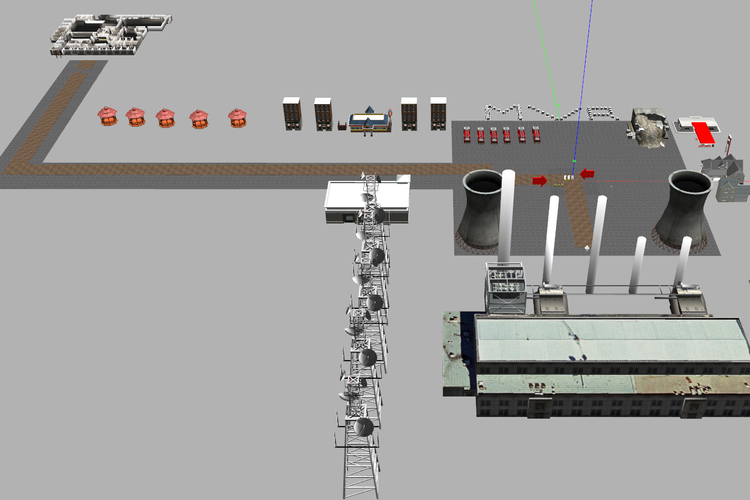
All codes that can be operated in the simulation environment are appropriate to work on real machines, the jackal machines used in the first environment can be seen in the preview the yellow UGV, on the side we can see the real machines. All the codes can be uploaded to these real machines and tested in real world if desired.
If there are people who want to test the codes in real world, they can load and run the codes on these vehicles, they will only need to change the namspaces and load the correct drivers. i In the picture there is a 2-d lazer added to the Jackal UGV which is not included in the simulation environment created by us, but it can be in the next steps.
The decision of how the future of the robotics in metaverse will be created is going to be made by the token holders. After the initial promotions, the contract for voting progress will be launched and the folk will vote for the options of how the simulation environment should be in the next steps.
Build the future of robotics together, stay tuned.
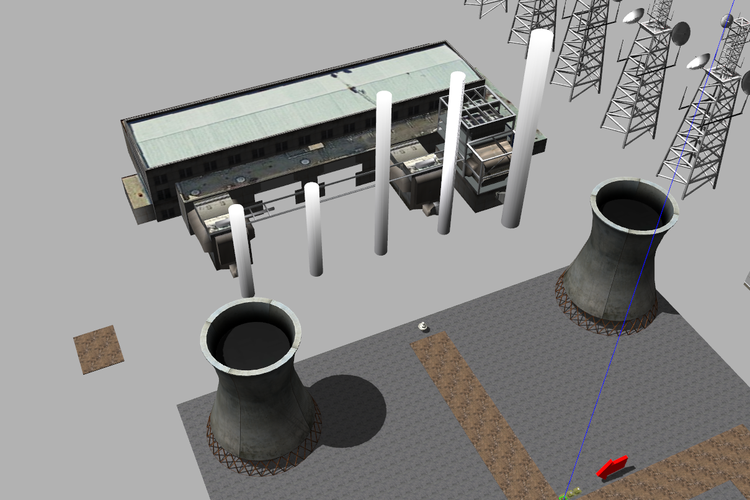
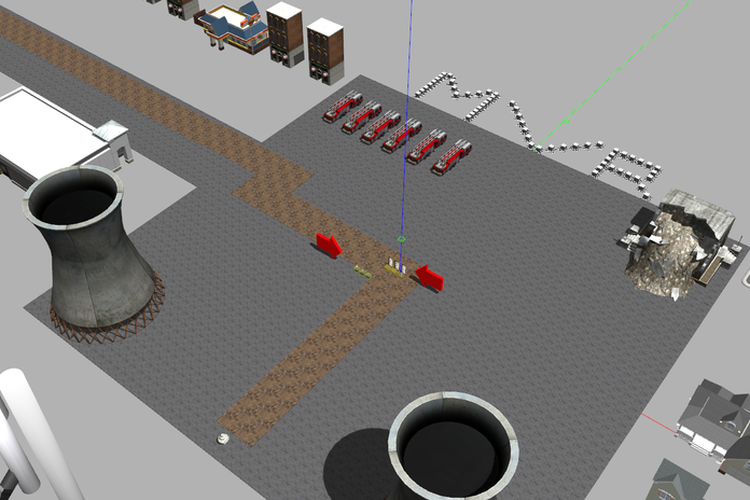
Parts of the MVR environment can be seen below.
Enjoy!

I imagine the Pink Robots colouring is a ruse to lull us into a false sense of security. I mean, who sees pink and thinks danger? But you’re not going to get anywhere in your career as a giant world beating anime-style ‘megabot’ if you don’t have at least a few tricks up your sleeves.
The Pink Robots
The Beastie Boys’ finest MTV moment saw the trio manning a robot that battles a giant octopus-headed creature armed with a pitchfork. The video is a nod to the old Kaju movies, right down to the scenes of the fleeing Japanese, with the battle itself somewhat resembling an episode of The Power Rangers.
‘Intergalactic’ Robot
A cold emotionless face combined with the sexy curves of the female body, all encased in steel, Maria is one of cinema’s most iconic images. She was played by Brigitte Helm, who technically took on the dual roles of the robot (or Maschinenmensch) and the human on whom it was modelled, in Fritz Lang’s sci-fi masterpiece Metropolis.
Maria
The 2 months Road-Map until the first selection.
M V R